
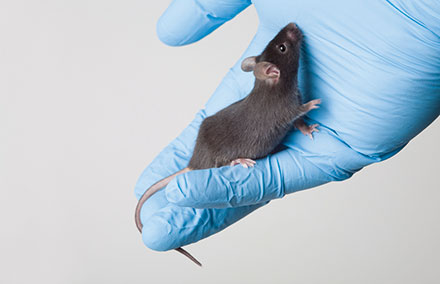
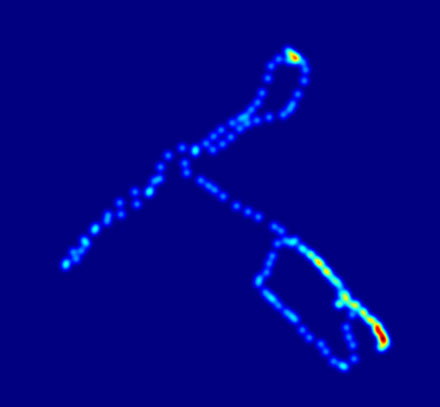
T字型迷路(T-maze)
![]()
T字型迷路は、空間学習と記憶の研究のための一般的なテストです。 ゼブラフィッシュの研究にもよく使用されます。連続したトライアルの間、視覚的、嗅覚的、触覚的または聴覚的手がかりに基づいて、2つのアームの間を区別するように動物に教えることが多くなります。
研究の自動化
EthoVision XTは動物の行動、活動、動きを詳細に追跡し、T-mazeやその他の機器を追加して、完全なソリューションを作成します。 実験を迅速に実行するために、EthoVision XTには、実験に合わせて微調整できるT字迷路のテンプレートが含まれています。
興味のある分野に関連する行動
効率的なデータ選択と分析のために、EthoVision XTでは、テストエリアのビデオ画像からさまざまなゾーンまたはポイントを指定することができます。 これにより、プログラムはこれらのゾーンに関連するパラメータを自動的に測定することができます。T字型迷路は、一般に開始ボックス/領域、開始アーム、および2つの目標アームに入ります。
動きと行動を詳細に追跡する
EthoVision XTは、マウスとラットの中心点だけでなく、鼻先と尾の付け根を検出して追跡します。 これにより、アリーナまたはアリーナ自体の特定の物体に対する動物の位置を正確に測定することが可能になります。
より効率的
研究を自動化することは、多くの大きなメリットをもたらします。 効率を高め、実験の標準化を支援し、より信頼性の高いデータが得られます。EthoVision XTをプログラムして動物の追跡を自動的に開始および停止することができ、手動で行うという面倒を抑えます。 例えば、動物がスタートボックスで検出されたらすぐに追跡を開始し、正しい目標アームに入った後に追跡を停止します。
外部機器の制御
NoldusがTrial&Hardware Control Moduleによりソフトウェア内から外部ハードウェアを制御できるようにすることで、実験をさらに自動化できます。 EthoVision XTを使用すると、ユーザー定義のプロトコルに基づいて外部ハードウェアを制御することができます。 これらのプロトコルは、簡単にドラッグして相互接続できる「ブロック」でいくつかのステップと条件を定義することで作成します。

パラメータの例
いくつかの変数は、T字型迷路試験の主要な関心事です。 これらはEthoVision XTで自動的に計算されます。
- 正しい腕が最初に入力された時間の割合
- 正しい腕に入るまでの待ち時間
- 両腕で過ごした合計時間
- 最初の腕の進入距離
- 速度