
ラジアルアーム迷路試験(Radial arm maze)
![]()
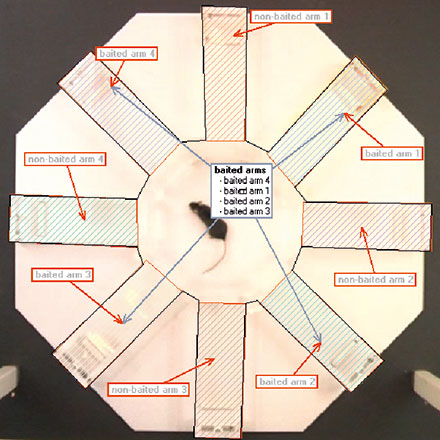
ラジアルアーム迷路は、ラットおよびマウスの作業記憶および参照記憶を評価するためによく使用されるパラダイムです。 作業記憶を調べる際には、通常、すべてのアームに(食糧)報酬が与えられ、動物は各アームを一度訪れなければなりません。 参照記憶を評価するために使用される場合、アームのいくつかだけが報酬を含み、動物はそれらの餌付けされたアームを訪れます。 1回以上のアームの訪問または餌が与えられていないアームの訪問は、それぞれ作業記憶障害または参照記憶障害としてカウントされます。
ラジアルアームの迷路は、手動または自動のドアを装備して洗練された実験を行うことによって変更することができます。 例えば、げっ歯類は、餌付けされたアームの扉が開かれる前に特定のアームを訪れるように学ぶことができます。
研究の自動化
Noldusはこのテストに最適なツールを提供します。 まず、 EthoVision XTは動物の行動、活動、動きを詳細に追跡します。 完全なソリューションを作成するために必要なラジアルアーム迷路およびその他の機器を追加します。 実験を迅速に実行するために、EthoVision XTにはラジオアーム迷路テンプレートが含まれており、好みの設定に微調整することができます。
興味のある分野に関連する行動
効率的なデータ選択と分析のために、EthoVision XTでは、テストエリアのビデオ画像からさまざまなゾーンまたはポイントを指定することができます。 これにより、プログラムはこれらのゾーンに関連するパラメータを自動的に測定することができます。
動きと行動を詳細に追跡する
EthoVision XTのマルチボディーポイントモジュールは、マウスやラットの中心点だけでなく、鼻先と尾の付け根をも検出して追跡することができます。 これにより、動物の相対的な位置を正確に測定することができます。 例えば、動物をコーナーの周りの鼻だけを撫でたり、体全体を放射状の迷路の腕の1つに動かすことを区別するために使用することができます。

外部機器の制御
ラジアルアームの迷路は、完全に自動化するための大きなテストです。 自動ドアが装備されており、洗練されたプロトコルを作成するためにEthoVision XTトライアル&ハードウェア・コントロールモジュールでプログラムされています。
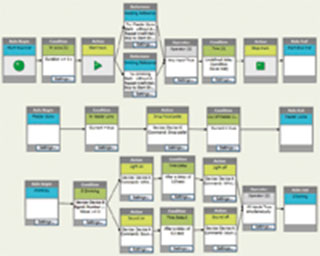
EthoVision XTを使用すると、ソフトウェア内から外部ハードウェアを制御できます。 この制御は、ユーザー定義のプロトコルに基づいています。 これらのプロトコルは、簡単にドラッグして相互接続できる「ブロック」でいくつかのステップと条件を定義することで作成します。
たとえば、ラジアルアーム迷路のすべてのドアを閉じてセッションを開始し、10秒後に開き、動物がその特定の腕に入るとすぐに1つのドアを除くすべてのドアを閉じることができます。
ラジアルアーム迷路構成要素
ラジアルアーム迷路は、最大8つのアームから成っています。 この迷路には手作業のギロチンドアが含まれていますが、EthoVision XTを使用すると、滑走路の下に取り付けられた静かなモーターを備えた自動ギロチンドア(オプション)を制御できるため、カメラの視界を妨げることがなくなります。

パラメータの例
ラジアルアーム迷路試験では、いくつかの変数が重要となります。 例には、すべての食糧報酬を集めるためのアームエントリーの総数、各アームへの訪問回数、最初のアームエントリーまでの待ち時間、および各アームで費やされた時間が含まれます。 EthoVision XTはこれらを自動的に計算できます。